Key Developments
ASSISTIVE SERVICE ROBOT - ROBCO 19
The robot has been developed with the goal to assists people in their everyday activities. It is constructed by mobile platform and robotic arm. It is equiped with several sensors - Laser scaner, USB camera, ultrasound and infrared sensors.

Some of the key properties of the robot are: autonomous navigation, object recognition and speech synthesis.
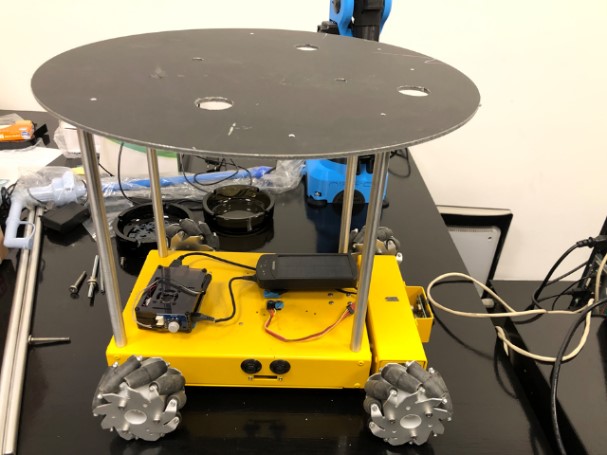
Mobile robocar ROBCO 20
The robot has been developed with the goal to transport autonomously different loads / shipments from one place to another. It consists of foy wheeled mobile platform with mecanum wheels. It is equiped with several sensors - Laser scaner, USB camera and ultrasound sensors.
Rehabilitation robot arm ROBCO ®
The Robco upper limb rehabilitation manipulator has 2 degrees of freedom, with a stroke volume from -30 to 180 °. It is controlled by PC and microprocessor controller, programming the parameters of the device (extension, flexion, pause, power and speed). It is intended for rehabilitation of the shoulder joint, elbow joints and wrist. The manipulator is versatile and is designed for both left and right hands. Used in a seat position.
