Основни разработки
Сервизен робот асистент ROBCO 19
Роботът е създаден с цел да подпомага хората в тяхното ежедневие. Той е съставен от мобилна платформа и манипулатор. Оборудван е с множество сензори – лазерен скенер, USB камера, ултразвукови и инфрачервени сензори.

Някои от основните свойства на робота са, че той може да работи в режим на автономна навигация, да разпознава основните предмети в дома и да предприема синтезира говор.
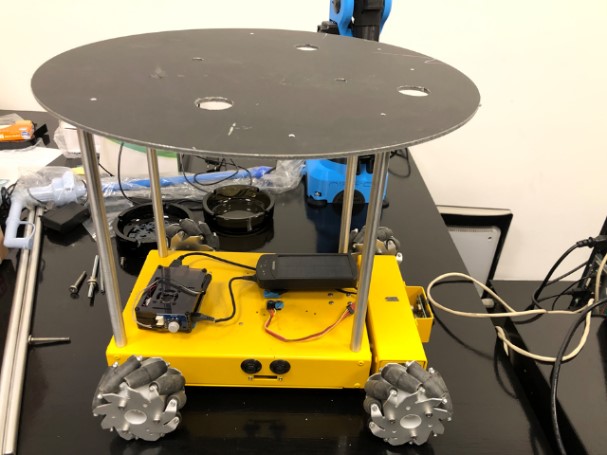
Мобилен робот транспортьор ROBCO 20
Роботът е създаден с цел да пренася автономно различни товари/пратки от едно място до друго. Той е съставен от четири-колесна мобилна платформа с колела от типа "mecanum wheels". Оборудван е с множество сензори – лазерен скенер, USB камера, ултразвукови сензори.
Роботизирана ръка за рехабилитация ROBCO ®
Манипулаторът за рехабилитация на горни крайници ROBCO има 2 степени на свобода, с зона на достижимост от -30 до 180°. Управлява се от компютър и микропроцесорен контролер за програмиране на параметрите на устройството (екстензия, флексия, пауза, мощност и скорост). Предназначен е за рехабилитация на раменната става, лакътните стави и китката. Манипулаторът е универсален и е проектиран както за лява, така и за дясна ръка. Използва се в седнала позиция.
